在人工智能與自動駕駛技術(shù)飛速發(fā)展的今天,許多芯片廠商競相推出算力驚人的車載芯片,宣稱其能為自動駕駛提供“強大腦”。一個關(guān)鍵問題隨之浮現(xiàn):有大算力就一定能搞好自動駕駛嗎?答案顯然是否定的。算力固然重要,但自動駕駛的實現(xiàn)是一個涉及硬件、軟件、算法、數(shù)據(jù)、安全及生態(tài)協(xié)同的復(fù)雜系統(tǒng)工程。
算力是基礎(chǔ),但不是唯一。自動駕駛系統(tǒng)需要實時處理來自攝像頭、激光雷達、毫米波雷達等多傳感器的海量數(shù)據(jù),進行感知、決策與控制。高算力芯片確實能提升處理速度和模型復(fù)雜度,比如支持更精準(zhǔn)的物體識別或更復(fù)雜的路徑規(guī)劃。如果算法模型低效、軟件架構(gòu)臃腫,再高的算力也可能被浪費,甚至引發(fā)功耗和散熱問題。例如,一些早期自動駕駛系統(tǒng)因算法優(yōu)化不足,即便搭載頂級芯片,仍會出現(xiàn)響應(yīng)延遲或誤判。
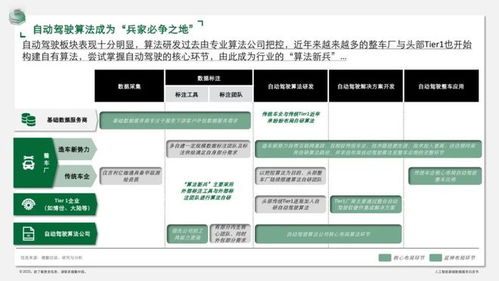
自動駕駛的核心在于“智能”,而智能的源泉是算法與數(shù)據(jù)。算力只是執(zhí)行算法的工具,若沒有先進的機器學(xué)習(xí)模型和高質(zhì)量的標(biāo)注數(shù)據(jù),系統(tǒng)無法從環(huán)境中學(xué)習(xí)并適應(yīng)復(fù)雜場景。例如,在城市道路中,突發(fā)行人橫穿、惡劣天氣或交通標(biāo)志遮擋等情況,需要算法具備強大的泛化能力和實時學(xué)習(xí)機制。芯片廠商需與算法公司緊密合作,開發(fā)針對性的硬件加速架構(gòu)(如NPU或TPU),才能讓算力“有的放矢”。
軟件開發(fā)與系統(tǒng)集成是關(guān)鍵橋梁。自動駕駛軟件棧包括感知、定位、預(yù)測、規(guī)劃與控制等模塊,其代碼質(zhì)量、模塊化設(shè)計和實時性要求極高。就算力芯片提供了硬件平臺,若軟件開發(fā)跟不上——比如中間件低效、測試驗證不足——系統(tǒng)整體性能仍會大打折扣。車規(guī)級安全標(biāo)準(zhǔn)(如ISO 26262)要求軟硬件具備高可靠性和冗余設(shè)計,這需要芯片廠商從設(shè)計初期就融入安全特性,而非單純追求算力峰值。
自動駕駛的成功離不開生態(tài)協(xié)同。從芯片、傳感器到整車制造,再到云平臺和法規(guī)政策,每個環(huán)節(jié)都需無縫銜接。算力芯片需與車輛控制系統(tǒng)、通信網(wǎng)絡(luò)(如5G/V2X)兼容,并支持OTA升級以適應(yīng)算法迭代。例如,特斯拉通過自研芯片和全棧軟件控制,實現(xiàn)了算力與算法的深度優(yōu)化;而傳統(tǒng)車企則多依賴供應(yīng)商生態(tài),需解決不同廠商組件間的集成挑戰(zhàn)。
大算力是自動駕駛的重要推動力,但絕非萬能鑰匙。芯片廠商在競逐算力競賽的更應(yīng)關(guān)注能效比、算法適配性、軟件工具鏈和產(chǎn)業(yè)合作。未來自動駕駛的突破,將依賴于“算力×算法×數(shù)據(jù)×軟件×安全”的乘法效應(yīng),只有多方協(xié)同進化,才能真正讓智能汽車安全、高效地馳騁于道路之上。